
SLAM (simultaneous localization and mapping),也稱為CML (Concurrent Mapping and Localization), 即時定位與地圖構建,或并發建圖與定位。問題可以描述為:將一個機器人放入未知環境中的未知位置,是否有辦法讓機器人一邊逐步描繪出此環境完全的地圖,所謂完全的地圖(a consistent map)是指不受障礙行進到房間可進入的每個角落。SLAM最早由Smith、Self和Cheeseman于1988年提出。由于其重要的理論與應用價值,被很多學者認為是實現真正全自主移動機器人的關鍵。
近些年來,隨著SLAM技術的不斷深入發展,SLAM相關產品已經應用到諸如自動駕駛、、掃地機器人、三維數據采集設備等領域。在測繪地理信息領域,SLAM三維掃描儀這幾年方興未艾,以飛馬機器人為代表的的SLAM100、SLAM2000等系列的手持式三維激光掃描儀,將空間數據采集工具進一步拓展,結合相關后處理軟件,形成了新的基于SLAM技術的空間三維數據獲取和建模解決方案。本文就基于SLAM掃描儀的數據進行了三維數據的采集和處理。
1.數據采集及預處理
通過手持式SLAM掃描儀,結合其移動性,可快速便捷的進行空間數據的三維采集,點云精度達到1-3厘米。
數據采集之后,結合后處理軟件,可以得到完整的空間三維真彩色點云數據。
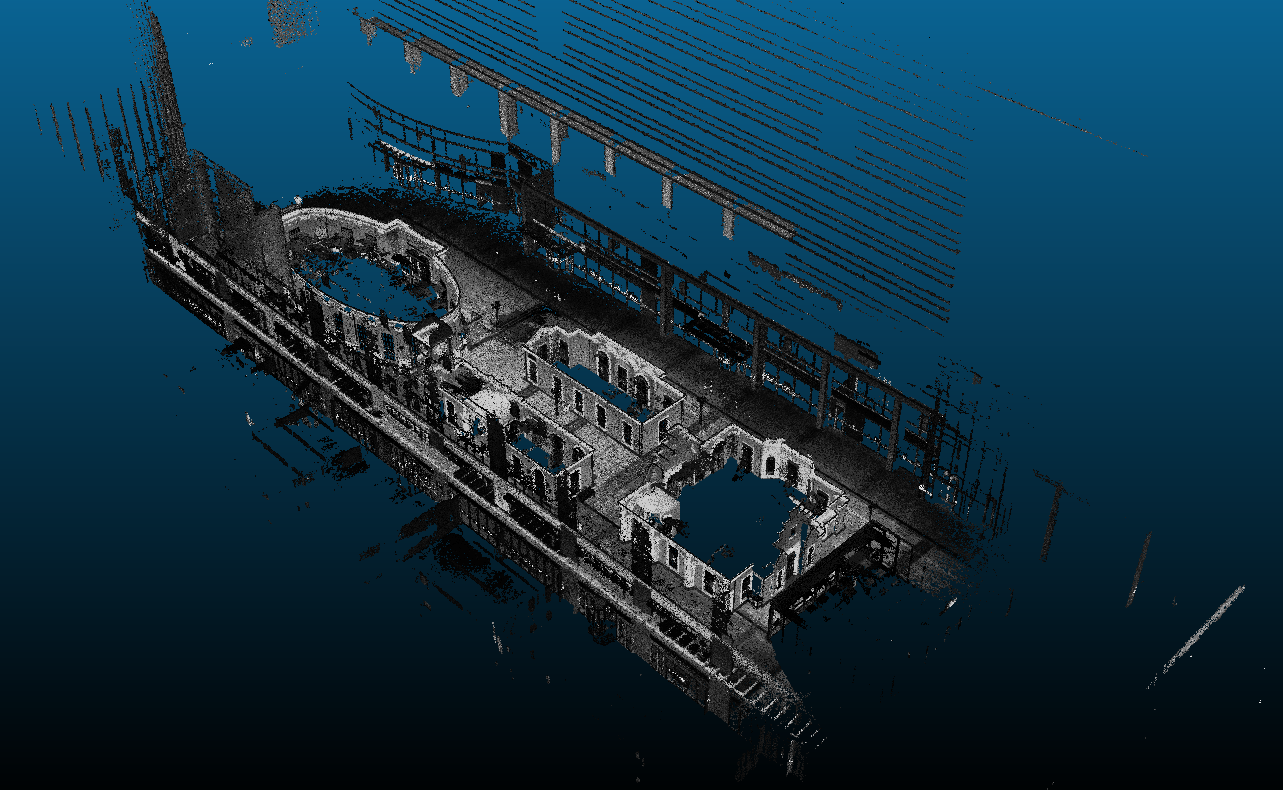
2.數據建模
將三維重建后的真彩色三維點云輸出成通用的文本格式或e57等格式,再導入到相應的三維建模軟件之中,或是我們安博泰克自己開發的三維軟件之中,可以進行基于點云數據的三維重建。
三維重建后的點云數據完整。


3.三維整理和貼圖
通過點云數據,可以進行三維重建。基于原始點云重建的三維模型一般是mesh格網,需要在特定的軟件中進行三維模型的整理,讓三維模型更加平滑。
對于紋理貼圖,除了傳統的基于3D Max的手工貼圖之外,我們也自己開發了三維快速自動貼圖的程序,無需手動貼題,直接利用SLAM掃描儀自帶的相機拍攝的紋理,可以讓機器自動完成貼圖,達到良好的三維貼圖效果。
這種自動貼圖的方式,大大減少了人工,提高了效率。

