
三維激光掃描(3D Laser Scanning)技術是近二三十年才發展起來的一種新的測量技術。它是利用激光測距的原理,通過記錄被測物體表面大量的密集的點的三維坐標信息和反射率信息,將各種大型的、復雜的、不規則、標準或非標準等實體或實景的三維數據完整的采集到電腦中,進而快速復建出被測目標的三維模型及線、面、體等各種圖件數據。另外,結合其他逆向工程軟件和各領域的專業應用軟件,它所采集點云數據還可進行各種后處理應用。由于三維激光掃描能夠完整、準確、精細的刻畫目標物體,因此三維激光掃描技術又被稱作“高清晰測量(High Definition Surveying)”。
利用激光進行距離測量已有近四十年的歷史,而自動控制技術的發展使得三維激光掃描成為現實,從而也實現了從傳統的測距儀、全站儀的單點測量進化到目前三維激光掃描技術的線測量或者說面測量的階段。三維激光掃描系統技術的應用包含兩個方面的重點內容,一個是如何獲取高精度的點云(Point Cloud)數據;另一個是如何對獲取的點云數據進行后期的處理和分析,以提取所需要的信息。? ?
??? 目前,三維激光掃描技術主要應用領域包括文物古跡保護、建筑、規劃、土木工程、工廠改造、室內設計、建筑監測、交通事故處理、法律證據收集、災害評估、船舶設計、數字城市、軍事分析等。
?
三維激光掃描儀是一種非接觸式主動測量系統,可進行大面積高密度空間三維數據的采集,具有點位測量精度高、采集空間點的密度大、速度快等特點,且融合了激光反射強度和物體色彩等信息,三維激光影像數據為測量目標的識別分析提供了進一步的研究內容。
三維激光掃描儀通過脈沖測距法獲得測距觀測值 S,精密時鐘控制編碼器同步測量每個激光脈沖橫向掃描角度觀測值α和縱向掃描角度觀測值θ。三維激光掃描測量一般使用儀器內部坐標系統 Pi,X軸在橫向掃描面內,Y軸在橫向掃描面內與X軸垂直,Z軸與橫向掃描面垂直。由此可得三維激光腳點P 坐標(XS,YS,ZS )的計算公式如下式:
?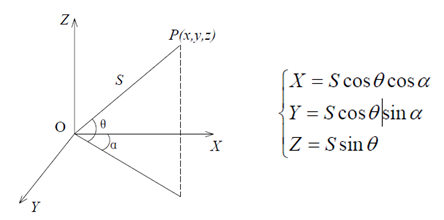
圖1 三維激光掃描儀空間坐標示意圖
?
一個典型的三維激光掃描系統,主要包含硬件部分,軟件部分和附件部分。
硬件部分主要包括掃描儀、三腳架、基座、筆記本電腦等;軟件部分主要包括用于控制掃描儀進行數據傳輸和存儲的軟件以及后處理的軟件。一般的三維激光掃描系統的廠商都會隨硬件提供給用戶用于數據采集管理的軟件,如Faro公司的FaroScene;或是提供了接口可用其軟件對硬件的數據獲取提供管理。
?
按照不同的分類標準,掃描儀可以分為不同的種類。按照掃描獲取的精度和作用距離來劃分,三維激光掃描儀可分為近距離掃描儀、中遠距離工程型掃描儀和長距離機載掃描儀。
近距離掃描儀,比如手持式激光跟蹤儀Leica T-Scan,其測量范圍可達30米,精度可達到微米級;柯尼卡-美能達公司的Vivid 910系列掃描儀,其測量范圍0.6~2.5米,掃描精度可達到0.01毫米。近距離掃描儀主要被汽車制造廠商和重工業企業廣泛使用,不但可滿足汽車、航空航天和精密機械領域的客戶關于精密計量的需要,還活躍在設計領域,協助客戶解決高精尖工程難題,從而顯著加速了客戶的創新流程。
中遠距離的工程型掃描儀,掃描的工作范圍為一米至數百米,掃描的精度達到毫米級。如FARO公司的X330相位式三維激光掃描儀,工作距離1米~330米,掃描精度可達到2毫米。工程型掃描儀主要應用在傳統的測繪測量領域,作為傳統測量手段的更新使用。一方面大大提高了效率,節省了人力成本,縮短了工期;另一方面由于掃描儀有非接觸測量的特點,因此對于一些特定的應用優于傳統方法。
工程型掃描儀應用領域包括文物古跡保護、建筑、規劃、土木工程、工廠改造、室內設計、建筑監測、交通事故處理、法律證據收集、災害評估、船舶設計、數字城市、軍事分析等。
長距離機載掃描儀,主要是指激光雷達(LiDAR)。激光雷達是"光探測和測距"(Light detection and ranging,LiDAR)的簡稱,主要由IMU/DGPS系統、激光掃描測距系統和成像裝置所組成。一般機載LiDAR)的飛行高度在幾百米至幾千米之間。例如,一般機載激光掃描系統,其飛行高度范圍從200m至6000m,獲取數據的平面精度和高程精度可達10厘米。LiDAR具有自動化程度高、受天氣影響小、數據生產周期短等特點,為獲取高分辨率地球空間信息,提供了一種全新的技術手段。目前,LiDAR主要用于軍事上獲取三維地理信息和民用的資源勘探、城市規劃、農業開發、水利工程、土地利用、環境監測、交通通訊、防震減災及國家重點建設項目等方面
??? 按照掃描儀的承載介質的不同,掃描儀可分為地面型掃描儀,車載型掃描儀和機載型掃描儀。地面型掃描儀主要架設在三腳架上或平整的物體表面上。車載型掃描儀有架設在汽車上的和地鐵軌道的軌檢車上的兩種。機載型主要是掛載在航空器上,如小型飛機,無人飛機或飛艇等。按照工作原理的不同,掃描儀可分為脈沖式掃描儀和相位式掃描儀。
5.1 原始點云數據
點云數據是實際物體的真實尺寸的復原,是目前完整、精細和快捷的對物體現狀進行檔案保存的手段。點云數據不但包含了對象物體的空間尺寸信息和反射率信息,結合高分辨率的外置數碼相機,可以逼真的保留對象物體的紋理色彩信息;結合其他測量儀器諸如全站儀、GPS,可以將整個掃描數據放置在一定的空間坐標系內。
通過專門的點云瀏覽軟件,我們可以在點云中實現漫游、瀏覽和對物體尺寸、角度、面積、體積等的量測。徹底替代了傳統的用皮尺測量的方法,直接將對象物體移到電腦中,利用點云在電腦中完成傳統的數據測繪工作,是完全的將實景復制到了電腦中。
5.2 二維線畫圖件
作為傳統測量測繪尤其是建筑測量的成果之一,是各種的線畫圖件,包括平面圖,立面圖和剖面圖等。這些圖件可以表示建筑物內部的結構或構造形式、分層情況,說明建筑物的長、寬、高的尺寸,地面標高,層頂的形式,門窗洞口的位置和形式,外墻裝飾的設計形式和各部位的聯系、材料及其高度等。利用點云數據,在CAD中使用一些專門的點云編輯的插件,可以方便的做出建筑物的平面、立面和剖面圖。不但生產速度大大提高,且減少了外業人員工作量,并能讓現有CAD技術人員充分利用自有的CAD制圖技術。
5.3 網絡發布的點云數據
利用一些專門軟件的發布模塊和插件,掃描的點云可以發布在互聯網上,讓遠端用戶通過互聯網有如置身于真實的現場環境之中。發布的點云不但可以網上瀏覽,還可以實現基于互聯網的量測、標注等。這有利于數據共享和現有目標對象的網上展示。尤其是對于一些不宜向公眾開放的文物景點或是突發事件的現場等,通過網上發布的彩色點云數據,可以滿足公眾的網上虛擬瀏覽的需求。再比如利用Skyline軟件,可以將點云數據導入到Skyline網絡發布平臺上,讓用戶在網絡環境下遠程三維動態瀏覽三維點云數據。
5.4 三維模型
三維激光掃描儀比較適用于各種工業廠房、近現代建筑、石化廠、煉油廠、海油平臺、古典建筑和佛像、雕塑、壁畫、石窟等的掃描和三維建模。掃描的數據可以利用隨機軟件或其他第三方軟件進行建模,構建mesh格網模型,再通過紋理映射或是導入到其他三維軟件中進行紋理貼圖,得到目標對象的數字化仿真模型。
5.5 視頻動畫
一些軟件提供給了空間漫游和電影動畫制作功能。在掃描后的點云中設置漫游路徑,可以實現有如真實空間中的漫游效果。通過軟件自帶的記錄功能,可以將漫游過程錄制成電影文件,是虛擬旅游的很好的工具,也有利于作為成果進行宣傳和展示。
?
6.1 數據處理流程
? ? ? ? 點云作為基礎數據,記錄了目標對象的坐標信息、反射率信息和紋理信息。而對點云的處理,主要分為色彩的處理、點狀和線狀特征的提取和體特征的提取。
? ? ? ? 點云作為客觀世界的真實記錄,色彩還原是基礎的步驟。原始的點云數據一般都是單色或者假彩色。單色是給點云賦予了單一的色彩,而假彩色則是根據一定的規則,比如點云中點的反射率的強弱(返回激光與出射激光之間的能量比值)或是點的高度,有規律的賦予每個點彩色信息。對于建筑文化遺產保護而言,一般需要還原為真彩色的點云數據。通常,采用高分辨率的數碼相機記錄下真實的色彩和紋理,通過軟件,進行紋理映射,將點云還原成真彩色。
? ? ? ? 對于點狀和線狀特征的提取,一般在現有的點云處理軟件都可以實現。點狀特征比較容易提取,可直接在點云中捕捉。線狀特征可直接通過捕捉關鍵點生成,也可通過軟件中的一些算法實現。比如利用基于CAD的插件,可在CAD中打開點云數據,進行切片處理,得到的點云切片可通過軟件自帶的擬合功能,將直線、圓、弧段等線狀特征通過計算自動擬合生成。
? ? ? ? 對于體特征的提取,如果對象是規則的幾何體,可通過點、線、平面、柱體、臺體、球體等或它們的組合加以實現。而對于非規則對象,特別是現代建筑等對象,其表面是復雜曲面,無法通過規則的幾何體進行表面建模,就需要專門的軟件進行體特征的提取。這類軟件主要有Polyworks和Geomagic等。其方法是通過一定的算法,構建對象表面的三角格網,從而形成對象的表面模型。再通過專門的虛擬現實軟件,比如3D max或Skyline等展示平臺,可以將對象進行數字化的展現。?
6.2 點云的精度
? ? ? ? 作為基礎數據,點云的質量直接影響后期處理的成果的精度。點云的精度一般包含了單點測量精度、角度精度、表面模型的精度、標靶的精度、雙軸補償器的精度等。國內學者對于掃描儀的精度指標,已經有了一些探究。其中,前三者與數據獲取的硬件設備緊密相關;而模型表面精度很大程度上取決于軟件的算法。距離精度是指沿著激光發射裝置和被測物體的連線的方向上,測量值和真值之間的偏差。點位精度是指垂直于激光發射裝置和被測物體的連線的方向上,測量值的與真值之間的偏差。距離精度和點位精度,統稱為點云的范圍噪音。范圍噪音與數據獲取的硬件設備的精度直接相關,也與外界環境,比如溫度、氣壓和被測物體本身的反射率相關。并且,由于激光測量的誤差始終存在,決定了范圍噪音隨著硬件技術的提升只能盡可能的減小,不能完全杜絕。圖2顯示了同一個被測物體(橫線代表被測的墻面)的高范圍噪音和低范圍噪音的數據,其中的小圓點代表了點云數據中的一個點。

圖2 高范圍噪音(左)和低范圍噪音(右)的點云數據
? 需要強調的是,范圍噪音是一個基于單點測量的精度的概念,它是多次重復測量的單點精度和重復性的度量,不是整體點云的絕對的準確度。這里需要引入一個描述點云的處理結果精度的概念:模型表面精度。所謂模型表面精度,是指利用軟件對點云中的大量的散點進行統計分析后,建立表面模型,得到的模型與真值之間的偏差。以圖中的兩個數據為例,分別對兩個數據進行統計分析建立模型之后,擬合出來的模型平面將非常接近。并且擬合出來的結果與真實墻面之間的偏差要大大小于范圍噪音。也就是說,由于模型表面精度是對大量散點統計計算后得出的結果,因此其比范圍噪音在數值上更小,也即模型表面精度要優于范圍噪音。模型表面精度與點云的質量有關,也與軟件中的算法有關。?
6.3 三維激光掃描系統的工程規劃
6.3.1 規劃的意義
? ? ? ? 三維激光掃描的工作是一個系統工程,按照流程,主要包括規劃、采集、拼接、建模、發布等五個大的流程環節,涉及到外業數據的采集和內業數據的處理。因此必須在前期有個完整的規劃,才能保證掃描工作能夠在計劃(時間、精度、成本)規定的范圍內完成。掃描規劃的意義,就是通過合理的外業掃描方案制定和工程的時間進度計劃制定,以保證掃描項目工程達到時間和經濟上的利益。
6.3.2.規劃的內容
三維激光掃描系統的工程規劃包括外業的掃描規劃和整個項目工作的時間規劃。
由于三維激光掃描儀的工作原理是基于激光測距,因此也決定了在有遮擋的地方,激光無法形成回波,因而無法獲取數據,造成數據的缺失,形成點云中的空洞區。這些缺失的數據必須通過搬站多次掃描的方式進行彌補。而架設的站點的數量,決定了外業的工作時間和獲取的點云的數據量。由于點云數據是海量數據,每多一站的掃描,不僅帶來的是時間上的不經濟,會增加外業工作的時間和成本,更多的是大量的點云數據的累積,對于后期的數據拼接和處理等增加工作量,增加了內業的處理時間。
在一些大型的掃描項目中,為了提高整體精度,不僅僅需要用到掃描儀,還需要配合全站儀使用,利用全站儀布置控制網。控制點的選擇也需要在前期進行合理的規劃。控制點的選擇,既要項目滿足精度要求,又要有滿足現場通視性的要求,還要求與掃描儀工作時能夠有效的配合,相互間可同時作業,而不相互干擾。此外,現場掃描之前,標靶的擺放位置和擺放數量,以及標靶的命名規則,都需要前期有個規劃。
三維激光掃描系統的時間規劃,則是基于掃描工程項目的成果需求,綜合考慮外業數據獲取時間與內業數據處理時間,以及工程團隊的人力資源情況,進行的整體的項目時間安排。
6.3.3 規劃的方法
1. 外業規劃的方法
? ? ? ? 從外業來說,需要規劃的內容很多,包括標靶的命名、站點的選擇、控制點的布設、精度選擇、掃描日志記錄內容等。首先,在進行外業規劃的時候,一般需要進行現場踏勘,并需要有詳細的現場注記和草圖,這兩個文件對于掃描工程是非常重要的。現場注記和草圖應該有一個包括掃描區域的平面圖,能顯示掃描儀和標靶的位置,以及每一站的標靶的名稱。另外,從掃描位置看出去的透視圖也應該畫一個,這有助于內業處理時了解數據的獲取時的情況,尤其是在遇到類似于標靶編號錯誤等復雜的情況時。 圖3就是一個規劃草圖的實例,在該掃描工程中,規劃共對建筑物(亭子)進行兩站數據掃描,兩站共用4個標靶用于拼接。結合現場查看的結果,我們可以在該草圖中繪制出整個掃描現場的掃描儀站點位置、標靶位置、標靶編號和每站掃描的視場角范圍。基于這個草圖,我們就能夠完成對這兩站掃描工程的外業掃描中的站點位置的規劃。
? ? ? ? 此外,在規劃階段,我們還可以制定一個掃描日志的模版。掃描日志可以記錄數據獲取階段的一些細節信息,有助于數據內業人員對數據處理的理解,減少錯誤和返場次數。表1就是一個掃描日志的例子。針對我們的規劃草圖3,在數據獲取階段,我們可以詳細記錄站點位置,測站的ID,每一站有幾次掃描,每一站掃描的標靶名稱,該站掃描的范圍,備注信息和該站掃描在點云數據中的點云視圖的名稱。這個掃描日志全面的記錄了外業數據獲取時的重要和必要的信息,一方面可以保證現場掃描按計劃有序的進行,另一方面也為后期數據處理時遇到問題進行查詢提供了依據。
?
?
圖3 外業規劃草圖
?
? ? ? ? ??
通過現場注記和現場草圖工具,我們就能夠實現用少的站點數獲取完整的點云數據。
2. 時間規劃的方法
? ? ? ? 三維激光掃描系統的工程規劃中的時間規劃,屬于項目管理中的時間管理一種。一般來說,時間規劃確保了整個工程能夠在預期的時間內完成。進行時間規劃需要關注以下六個方面的因素:明確成果范圍、排列工程活動次序、估算工程資源、估算活動持續時間、制定進度計劃。
? ? ? ? 成果范圍決定了所花費的時間和人力成本,對于三維激光掃描系統工程而言,外業掃描的數據密度要求越高,其數據獲取的時間會越長,相應的數據量會更大,對后期業內處理的也會增加工作量;而成果的精度的不同也會帶來數據處理時間上的顯著差異。從目前的時間經驗來看,一般外業和內業的處理時間一般在1:3-1:5之間,即一天掃描的數據,根據成果的范圍不同,可能需要3-5天的處理時間。
在成果范圍明確了之后,可對整個掃描工程項目的活動依次進行排序,主要包括采集、拼接、建模和發布等幾個大的活動。在排列完工程活動次序之后,可估算整個掃描工程可以利用的所有資源,包括人員、設備和現場作業環境條件。上述工程資源進行了估算之后,則可進行每個工程活動的持續時間的估算。
? ? ? ? 由于在進行時間估算的時候,會有不確定性的因素。因此,考慮這些不確定性因素或可能潛在的風險,會提高上述每個工程活動的持續時間估算的準確性。
? ? ? ? 目前,三維激光掃描技術的應用領域廣泛,主要包括:
1)各種項目任務及產品戰略的系統仿真、戰略規劃、實效推延、電腦模擬、預研預演、虛擬現實分析及評估。
2)實物原始三維數據及結構形態的現場采集、非線性采集、三維存檔、改造改進、逆向三維重構、任務仿真、模擬及評估、結構特性分析、校驗正向設計、各種結構特性測試及試驗等。
3)改造工程中的工程規劃、吊裝、裝配、管道布線、方案評估、校驗、布局仿真、三維可視化管理等。
4)設施的變形、老化、維修、檢測、監測、翻新、更新、加工、仿研、仿制、結構分析、強度分析、靜動力分析、加載分析、碰撞試驗、結構仿真、內視等。
5)企業可視化管理及虛擬現實應用,如:訓練、培訓、試驗、虛擬制造、虛擬設計、虛擬試驗、虛擬視景、設施管理、GIS展示等。
6)設施的二維制圖還原(如:針對陳舊設施、年久失修的設施、數據缺損的設施、老化變形的設施等)及無紙化操作。
(版權所有,違者必究)
---
四川安博泰克科技有限公司,位于天府之國的成都市武侯區青年創業園,公司以智能三維為目標,依托北京大學、中央美術學院、香港大學等國內外高校的智力資源,將產、學、研緊密結合,致力于元宇宙、數字孿生、人工智能、5G通訊、空間測量、機器視覺與地理信息技術相結合,提供地理空間的智能三維技術研發與應用服務。
四川安博泰科技有限公司?
地址:四川省成都市武侯區武興四路166號西部智谷D區6棟604室?
電話:13308213494
郵箱:li@ambertek.net
網站:www.shuzita.com